Borne robotique pour l'assistance à la recharge électrique rapide et à haut rendement de véhicules électriques
Contexte et enjeux
Objectifs
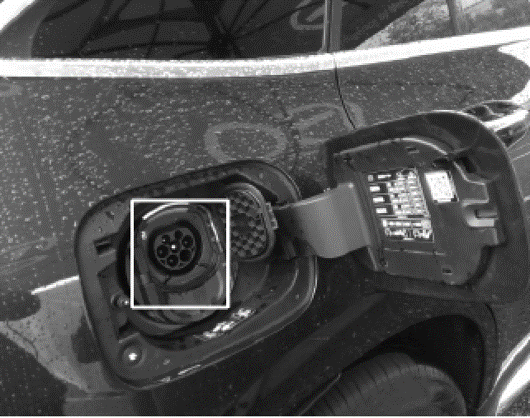
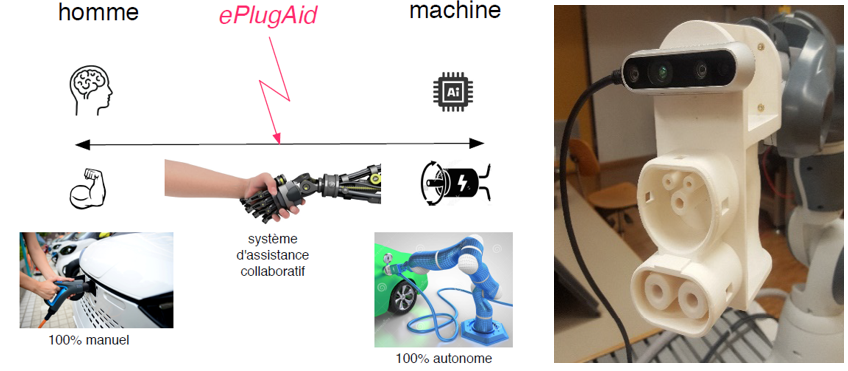
Ce projet vise la recherche et le développement d’un système de vision pour l’assistance au contrôle d’un pistolet de recharge électrique motorisé. Le système, par rétroaction, garantit la sécurité (véhicule-utilisateur) en guidant l’utilisateur pour faciliter le branchement.
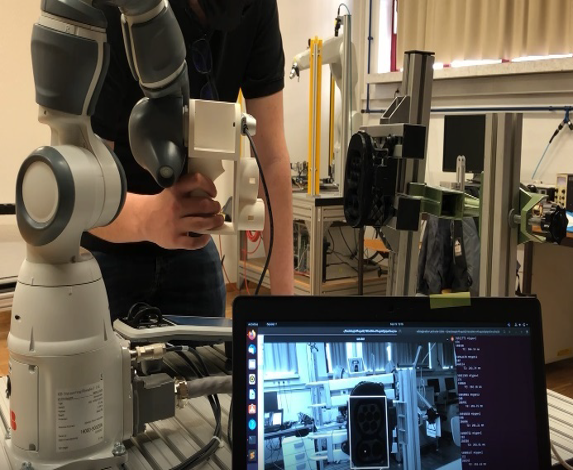
Pour la détection et le tracking du connecteur en temps réel, un Cobot et des capteurs 2D et 3D sont utilisés.
Partenaires et financement
Projet financé par la HES-SO.
Résultats
Le capteur 2D/3D RealSense retenu après l’essai de diverses technologies a permis l’intégration et l’adaptation efficace d’algorithmes de détection (Yolo), de tracking, et de calcul de trajectoire pour la connexion. Des images de synthèse (Covid), puis réelles (TCS eMobility days), ont amélioré la robustesse. Enfin, une intégration avec un Cobot Yumi a permis de tester le prototype complet.