Robots collaboratifs apprenants par démonstration
Contexte et enjeux
Afin de rester concurrentielle sur la scène internationale, la Suisse doit de plus en plus robotiser / automatiser ses chaînes de production. Selon les dernières statistiques (2016), la Suisse a 128 robots industriels en fonction pour 10’000 employés. Ce chiffre est supérieur à la moyenne mondiale (74 unités) mais bien en retrait de pays tels que la Corée du Sud (631 unités) ou l’Allemagne (309 unités).
Dans ce contexte, un nouveau type de robot est apparu il y a quelques années : les robots collaboratifs. Ces robots, au contraire des robots industriels standards qui travaillent derrière des barrières de sécurité, peuvent travailler en collaboration avec les humains et donc sans barrière de sécurité.
Objectifs
L’objectif principal du projet est de faciliter la programmation de robots et plus particulièrement de robots industriels collaboratifs afin de rendre leur réaffectation à de nouvelles tâches plus faciles. Le but est donc de réduire le temps de programmation, et diminuer le coût de déploiement d’un système robotisé pouvant aller jusqu’à 60%.
Partenaires et financement
Financé par la HES-SO
Résultats
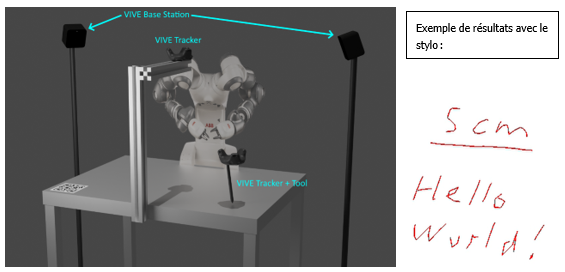
Une architecture et un setup ont été développés, le robot YuMi est notre robot de test dans ce projet :
Valorisation
RIZZOTTI-KADDOURI, A., KUNZE, M., JEANNERET, L., et al. Learning from Demonstration for Collaborative Robots. Automation, Robotics & Communications for Industry 4.0, 2021, p. 45.